Actualités & articles
Qu’est-ce que l’architecture ouverte?
Cet article est issu de l’article original What is Open Architecture?
Certaines des questions les plus fréquemment posées lors de l’introduction des systèmes Quanser sont «L’utilisateur peut-il modifier le contrôleur?» et « puis-je accéder au moteur? » La réponse aux deux est OUI.
Les systèmes à architecture ouverte QUANSER permettent aux utilisateurs d’accéder directement aux capteurs et actionneurs. C’est ce que nous appelons «l’architecture ouverte». L’accès direct est activé via le logiciel de prototypage de contrôle rapide en temps réel de Quanser – QUARC pour MATLAB / Simulink ou QRCP pour LabVIEW .
Commencez par les exemples de modèles Simulink…
 Prenons l’ exemple du servo rotatif Quanser. C’est l’un de nos produits phares et les plus anciens. Ce système d’asservissement robuste et à engrenages comprend un moteur à courant continu de haute qualité et trois capteurs: un codeur optique rotatif (incrémental), un potentiomètre et un tachymètre.
Prenons l’ exemple du servo rotatif Quanser. C’est l’un de nos produits phares et les plus anciens. Ce système d’asservissement robuste et à engrenages comprend un moteur à courant continu de haute qualité et trois capteurs: un codeur optique rotatif (incrémental), un potentiomètre et un tachymètre.
Comme avec tous nos systèmes, le servomoteur rotatif est livré avec des exemples de modèles Simulink et de scripts Matlab. Le modèle Simulink ci-dessous montre la mise en œuvre d’un compensateur proportionnel-dérivé (PD) pour contrôler la position du moteur.
Le modèle Simulink utilise une combinaison de blocs Simulink standard, par exemple, Derivative , Gain et Transfer Fcn , et des blocs supplémentaires de la bibliothèque QUARC Targets. Comme je l’ai mentionné précédemment, QUARC est le logiciel de prototypage de contrôle rapide de Quanser. Il s’agit d’un logiciel RCP en temps réel facile à utiliser, flexible et extrêmement puissant, parfaitement intégré dans l’environnement MATLAB / Simulink. Si vous savez utiliser MATLAB / Simulink, vous savez déjà comment utiliser QUARC.
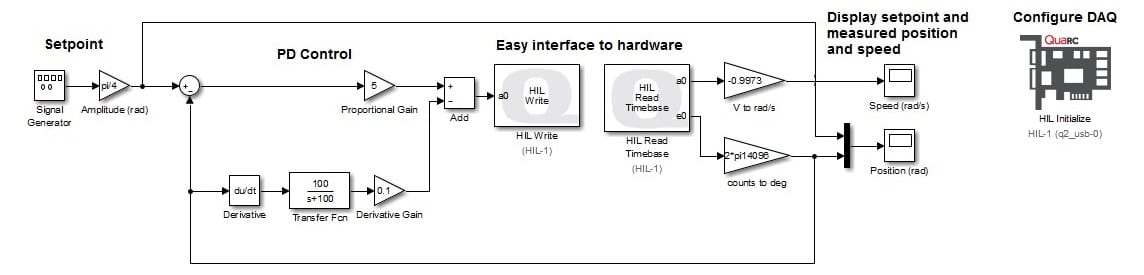 Modèle Simulink utilisant des blocs QUARC pour implémenter un contrôle de position basé sur PD de l’unité de base servo rotative Quanser
Modèle Simulink utilisant des blocs QUARC pour implémenter un contrôle de position basé sur PD de l’unité de base servo rotative Quanser
Les blocs QUARC de base pour l’interface matérielle sont: HIL Initialize , HIL Read et HIL Write . Ces trois blocs permettent à l’utilisateur de lire / écrire sur tous les canaux d’entrée et de sortie du dispositif d’acquisition de données (DAQ) et, par conséquent, sur les actionneurs et capteurs du système.
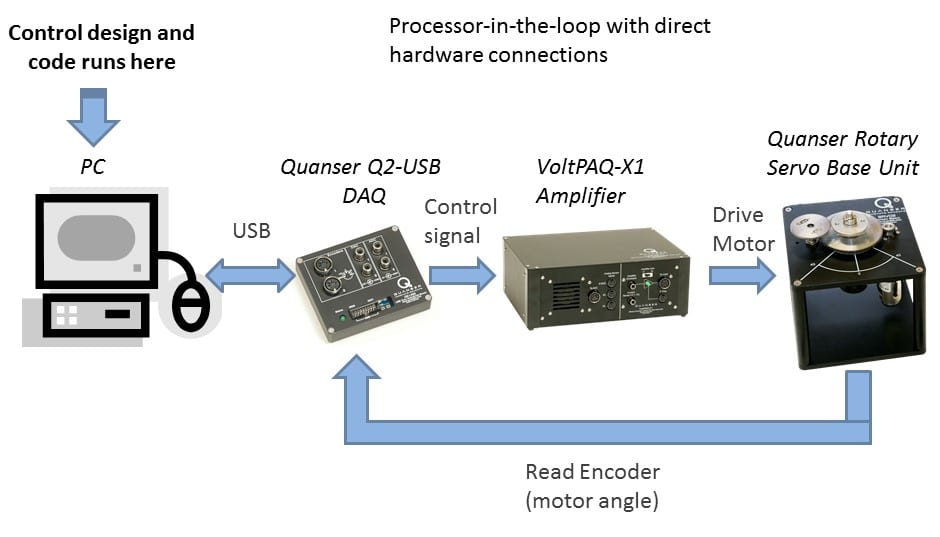
Dans ce cas, le bloc HIL Read Timebase est configuré pour lire la vitesse du servo avec son tachymètre sur l’entrée analogique (A / D) # 0 et la position de l’engrenage de charge à l’aide de son encodeur sur l’entrée d’encodeur # 0. La commande PD calcule une tension basée sur l’erreur entre le point de consigne (c’est-à-dire la position souhaitée) et la position mesurée basée sur le codeur. La tension de commande PD est appliquée au servomoteur CC à l’aide de la sortie analogique (D / A) # 0 via l’amplificateur de puissance connecté. Tout cela se fait via le périphérique d’acquisition de données (DAQ) Quanser Q2-USB, qui est configuré à l’aide du bloc d’ initialisation HIL . L’illustration ci-dessous montre comment les différents systèmes du poste de travail interagissent les uns avec les autres.
… Puis créez vos propres modèles Simulink
Notre approche d’architecture ouverte pour la conception du système Quanser signifie que les exemples de modèles Simulink peuvent être modifiés . Par exemple, si vous souhaitez implémenter un système de contrôle robuste tel que le mode coulissant avec un observateur, le diagramme pourrait ressembler à ceci:
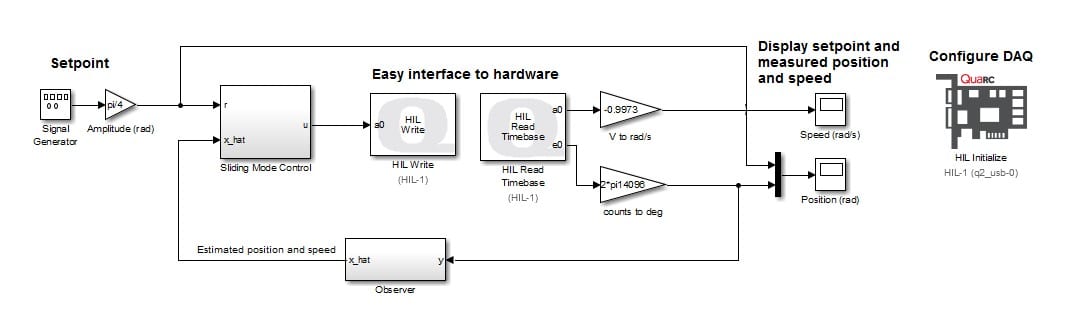
Un modèle Simulink pour implémenter un contrôle de mode glissant avec un observateur
Vous pouvez également créer un tout nouveau modèle Simulink et interagir avec le système expérimental. Avoir un accès direct au matériel et aux puissants outils logiciels est extrêmement utile dans la recherche. En fait, la conception de l’architecture ouverte et notre logiciel de prototypage de contrôle rapide en temps réel sont les principales raisons pour lesquelles les systèmes Quanser sont devenus de facto les plates-formes de validation standard pour les chercheurs. Voir plus de 1 350 articles de recherche répertoriés sur notre site Web pour des exemples. Pour en savoir plus, lisez notre livre blanc La plateforme Quanser pour la validation de la recherche sur les systèmes de contrôle .