Pendule inversé à 2 DDL

Pendule inversé à 2 DDL
Introduction aux principes avancés de la robotique
Le système de pendule inversé à 2 DDL est idéal pour introduire les concepts plus avancés de la robotique. Il peut être utilisé pour illustré les enjeux rencontrés dans les applications aéronautiques en conditions réelles, comme la stabilisation d’une fusée durant le décollage par exemple.
Le module de pendule inversé couple deux unités servomoteurs SRV02 de base pour constituer un système plus complexe et instable.
En savoir plus >
![]()
BROCHURE
![]()
video
![]()
extrait simulink
Aperçu
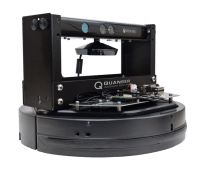
Le système de pendule inversé est constitué de deux unités servomoteurs SVR02 reliées par une jonction instrumentée, sur laquelle est montée une tige de 30 cm. La tige est libre de se balancer autour de deux axes orthogonaux. Les arbres de sortie des deux unités SVR02 sont couplés par une chaîne cinématique constituée par un lien à quatre sections, créant ainsi un module robot manipulateur plan (robot à 2 DDL). La jonction 2 DDL est attachée à l'extrémité des effecteurs des bras du robot.
L'objectif de l'expérimentation du pendue inverse à 2 DDL est de commander la position des extrémités des effecteurs du robot plan pour balancer le pendule. En mesurant la déviation du pendule par rapport à la verticale, un contrôleur peut alors être utilisée pour faire tourner les servomoteurs et ainsi actionner tout la chaîne pour que finalement l'extrémité de l'effecteur balance le pendule.
Modèlisation
- Représentation espace d'états
Contrôle
- Commande linéaire quadratique (commande LQ)
Pour SIMULINK | Pour LabVIEW |
|
|

Détails Produits
| Masse du module de jonction (4 segments) | 0.335 kg |
| Masse d'une seule jonction | 0.065 kg |
| Longueur d'une barre de jonction | 0.127 m |
| Masse du pendule (avec le raccord en T) | 0.127 kg |
| Masse du pivot à 2 DDL avec 2 encodeurs | 0.30 kg |
| Longueur totale du pendule (du pivot à la tige) | 0.3365 m |
| Moment d'inertie du lien sur le rouage | 8.74 x 10-5 kg.m² |
| Moment d'inertie du lien autour du pivot | 3.49 x 10-4 kg.m² |
| Sensibilité de l'encodeur à la jonction 2 DDL du pendule | 0.0879 deg/count |